
Design Concepts Overview#
Sugarcoat is designed to transform standard ROS2 nodes into robust, self-healing, and dynamic building blocks for autonomous systems. The architecture is centered around four key pillars: Modular Execution, Active Resilience, Event-Driven Behavior, and Centralized Orchestration.
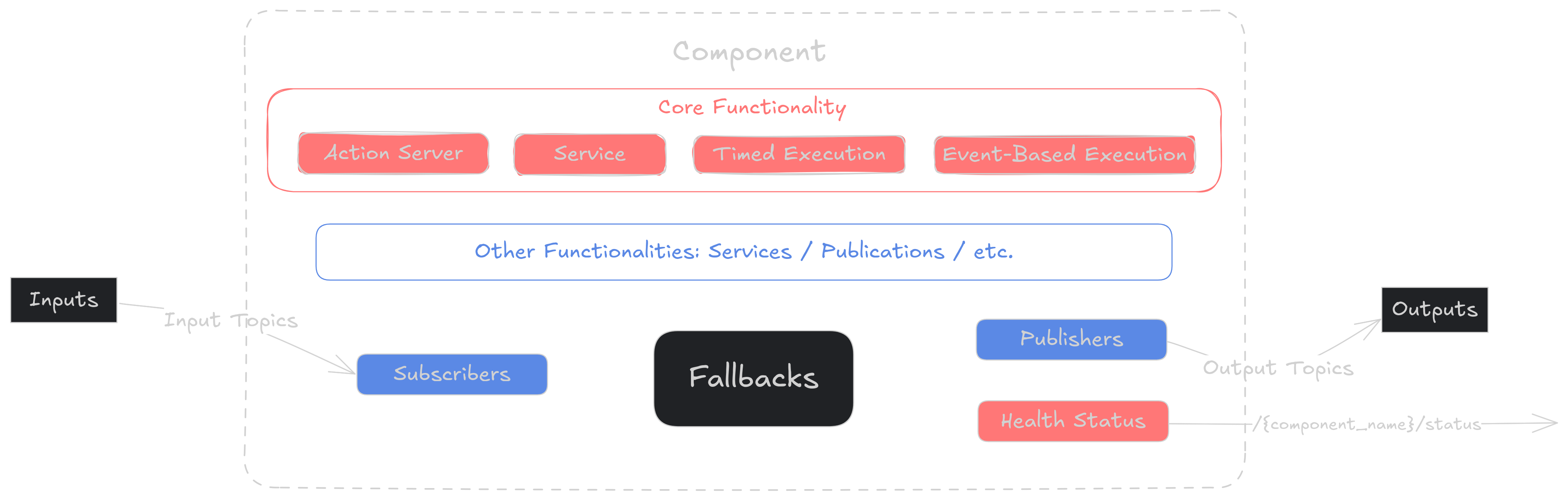
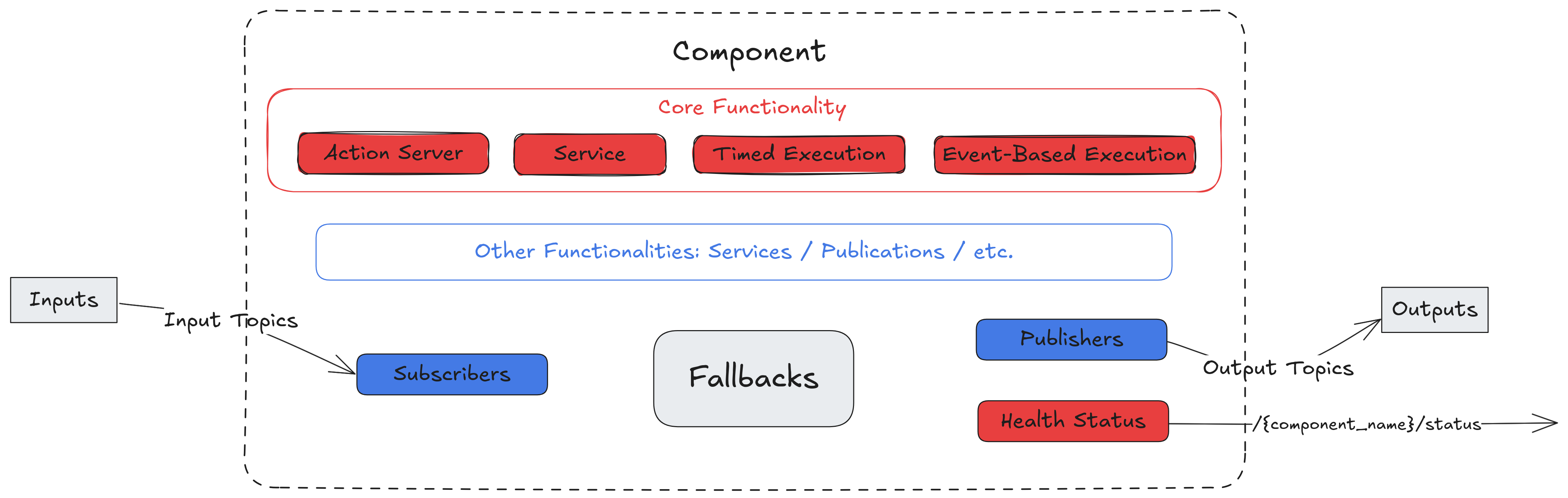
The following diagram illustrates how a single Component is structured to handle inputs, outputs, health monitoring, and recovery behaviors internally.
Component Structure#
Component Structure#
1. The Component: Smart Execution#
At the heart of the system is the Component. Unlike a standard ROS2 node, a Sugarcoat Component is Lifecycle-managed and Health-aware by default. It executes a specific logic (e.g., a path planner, a driver, or a controller), and validates its own configuration automatically.
2. Active Resilience: Status & Fallbacks#
Robots fail. Sugarcoat Components are designed to handle failure gracefully rather than crashing.
Health Status: Every component continuously reports its internal state, distinguishing between Algorithm failures (e.g., “no path found”), Component failures (e.g., “driver crash”), or System failures (e.g., “missing input”).
Fallbacks: When a failure is detected, the component automatically triggers pre-configured recovery strategies—such as retrying an operation, re-initializing a driver, or safely shutting down—without requiring external intervention.
3. Dynamic Behavior: Events & Actions#
To create reactive autonomy, Sugarcoat layers an Event-Driven system on top of standard data flows.
Events: These act as triggers that monitor ROS2 topics for specific conditions (e.g., “Battery < 20%”, “Target Lost”, or “New Terrain Detected”).
Actions: When an Event triggers (or a Fallback activates), an Action is executed. Actions can reconfigure components, switch controllers, start/stop processes, or send goals to other nodes.
4. Orchestration: Launcher & Monitor#
Finally, the system is brought to life and supervised by the Launcher and Monitor.
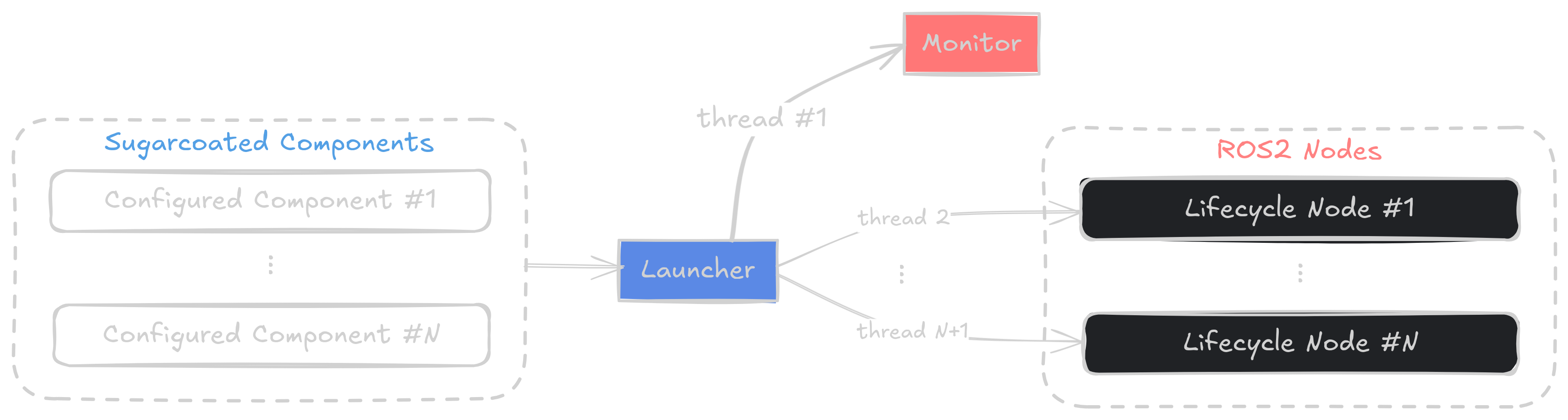
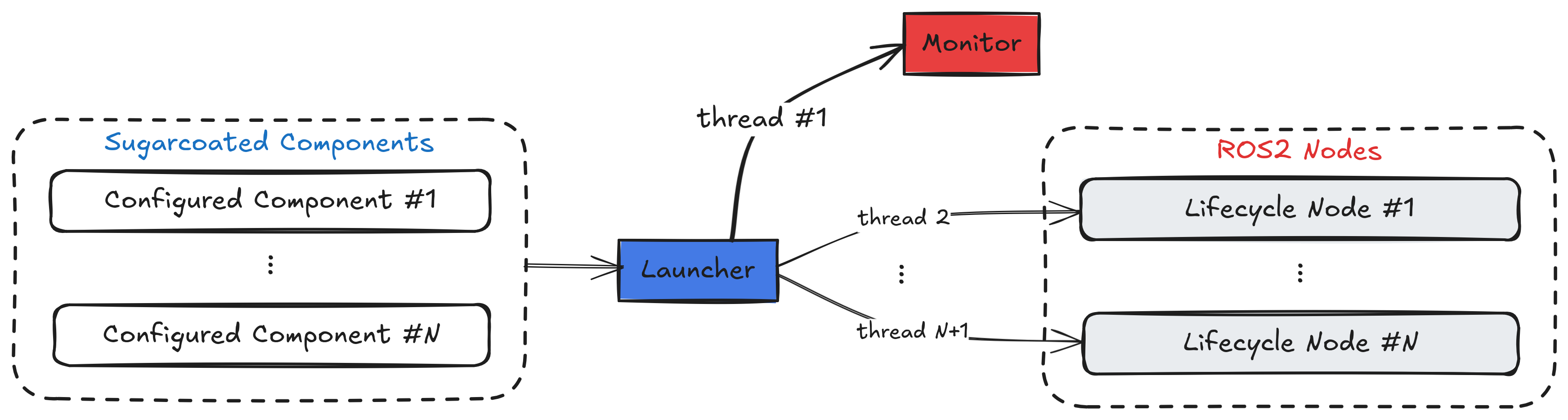
Launcher: A Pythonic interface to define and deploy your system. It supports running components in Multi-threaded or Multi-process modes, managing their lifecycles automatically.
Monitor An internal node that runs alongside your components. It acts as the system supervisor, listening to global Events and Component Health Statuses to coordinate system-wide responses.
Execution Models#
Sugarcoat supports flexible execution models to suit your performance needs:
Multi-threaded Execution:#
Components run as threads within a single process, sharing memory for low-latency communication.
Multi-threaded execution#
Multi-threaded execution#
Multi-process Execution#
Components run in separate processes for isolation and stability, coordinated by the Launcher.

Multi-process execution#

Multi-process execution#