ROS Sugar 🍬#
ROS SUGAR 🍬 provides a whole lot of syntactic sugar for creating multinode ROS2 event-driven systems and management using an intuitive Python API.
Learn more about the design concepts in ROS Sugar 📚
Learn how to create your own ROS2 package using ROS Sugar 🚀
Overview#
ROS Sugar is built for ROS2 developers who want to create robust, event-driven systems with multiple nodes that are easy to use and can be configured and started with an intuitive python API. It provides primitives for writing ROS nodes and events/actions which can start/stop/modify the nodes, in the spirit of event driven software standard. ROS Sugar is also a replacement for the ROS Launch API.
A Component is the main execution unit in ROS Sugar, each component is configured with Inputs/Outputs and Fallback behaviors. Additionally, each component updates its own Health Status, to keep track of the well/mal functioning of the component. Components can be handled and reconfigured dynamically at runtime using Events and Actions. Events, Actions and Components are passed to the Launcher which runs the set of components as using multi-threaded or multi-process execution. The Launcher also uses an internal Monitor to keep track of the components and monitor events.
Component Structure#
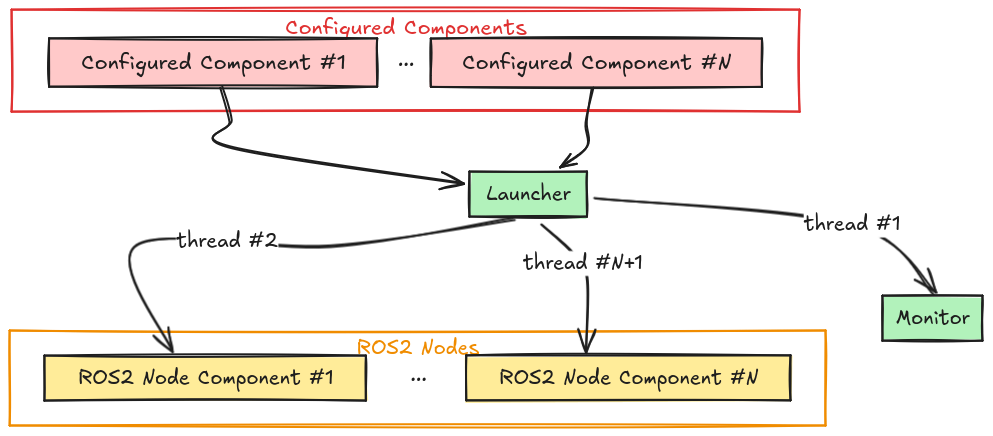
Multi-threaded execution#
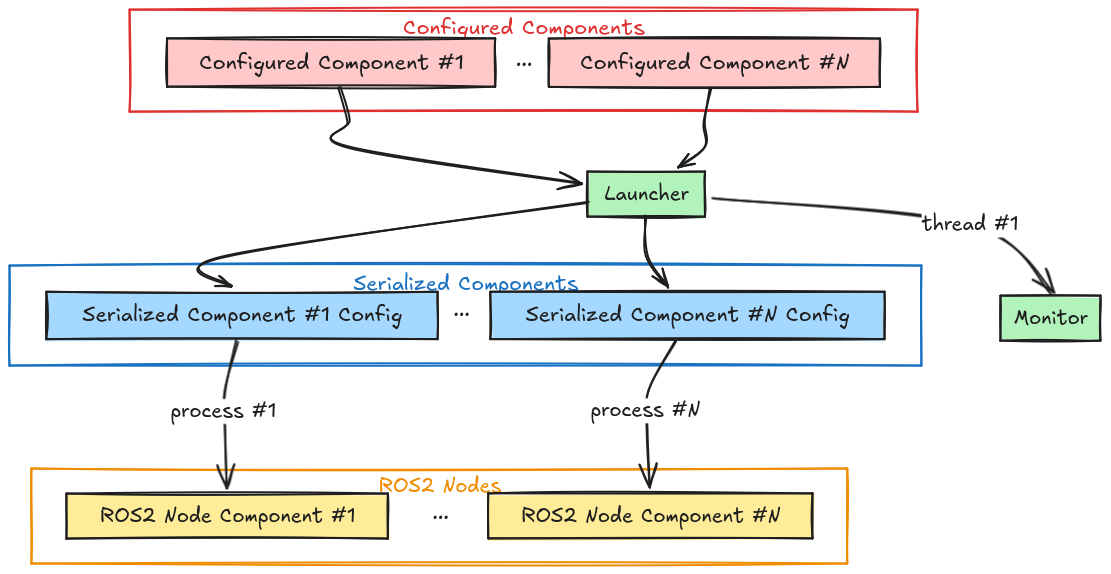
Multi-process execution#
Packages created using ROS Sugar#
Kompass: a framework for building robust and comprehensive event-driven navigation stacks using an easy-to-use and intuitive Python API
ROS Agents: a fully-loaded framework for creating interactive embodied agents that can understand, remember, and act upon contextual information from their environment.
Design Concepts
Using ROS Sugar
Advanced
References