
DWA (Dynamic Window Approach)#
DWA is a popular local planning method developed since the 90s.[1] DWA is a sampling-method that consists of sampling a set of constant velocity trajectories within a window of admissible reachable velocities. This window of reachable velocities will change based on the current velocity and the acceleration limits, i.e. a Dynamic Window.
At each step, the reachable velocity range is computed based on the acceleration limits and the motion model of the robot. Then a set of constant velocity trajectories is sampled within the range after checking its admissibility. Finally, the best trajectory is selected using the trajectory cost evaluation functions.
Supported Sensory Inputs#
LaserScan
PointCloud
OccupancyGrid
Parameters and Default Values#
Name |
Type |
Default |
Description |
|---|---|---|---|
control_time_step |
|
|
Time interval between control actions (sec). Must be between |
prediction_horizon |
|
|
Duration over which predictions are made (sec). Must be between |
control_horizon |
|
|
Duration over which control actions are planned (sec). Must be between |
max_linear_samples |
|
|
Maximum number of linear control samples. Must be between |
max_angular_samples |
|
|
Maximum number of angular control samples. Must be between |
sensor_position_to_robot |
|
|
Position of the sensor relative to the robot in 3D space (x, y, z) coordinates. |
sensor_rotation_to_robot |
|
|
Orientation of the sensor relative to the robot as a quaternion (x, y, z, w). |
octree_resolution |
|
|
Resolution of the Octree used for collision checking. Must be between |
costs_weights |
|
see defaults |
Weights for trajectory cost evaluation. |
max_num_threads |
|
|
Maximum number of threads used when running the controller. Must be between |
Note
All the previous parameters can be configured when using DWA algorithm using a YAML config file (as shown in the usage example)
Usage Example:#
DWA algorithm can be used in the Controller component by setting ‘algorithm’ property or component config parameter. The Controller will configure DWA algorithm using the default values of all the previous configuration parameters. The specific algorithms parameters can be configured using a config file or the algorithm’s configuration class.
from kompass.components import Controller, ControllerConfig
from kompass.robot import (
AngularCtrlLimits,
LinearCtrlLimits,
RobotCtrlLimits,
RobotGeometry,
RobotType,
RobotConfig
)
from kompass.control import ControllersID
# Setup your robot configuration
my_robot = RobotConfig(
model_type=RobotType.ACKERMANN,
geometry_type=RobotGeometry.Type.BOX,
geometry_params=np.array([0.3, 0.3, 0.3]),
ctrl_vx_limits=LinearCtrlLimits(max_vel=0.2, max_acc=1.5, max_decel=2.5),
ctrl_omega_limits=AngularCtrlLimits(
max_vel=0.4, max_acc=2.0, max_decel=2.0, max_steer=np.pi / 3)
)
# Set DWA algorithm using the config class
controller_config = ControllerConfig(algorithm="DWA")
# Set YAML config file
config_file = "my_config.yaml"
controller = Controller(component_name="my_controller",
config=controller_config,
config_file=config_file)
# algorithm can also be set using a property
controller.algorithm = ControllersID.DWA # or "DWA"
my_controller:
# Component config parameters
loop_rate: 10.0
control_time_step: 0.1
prediction_horizon: 4.0
ctrl_publish_type: 'Array'
# Algorithm parameters under the algorithm name
DWA:
control_horizon: 0.6
octree_resolution: 0.1
max_linear_samples: 20
max_angular_samples: 20
max_num_threads: 3
costs_weights:
goal_distance_weight: 1.0
reference_path_distance_weight: 1.5
obstacles_distance_weight: 2.0
smoothness_weight: 1.0
jerk_weight: 0.0
Trajectory Samples Generator:#
Trajectory samples are generated using a constant velocity generator for each velocity value within the reachable range to generate the configured maximum number of samples (see max_linear_samples and max_angular_samples in the config parameters).
Tip
The effective total number of generated samples will depend on the motion model of the robot, as non-holonomic robots will only sample along the forward and angular velocity, while holonomic robots (Omni) will also sample lateral velocities.
Note
To maintain a natural movement For both Differential drive and Omni robots; rotation in place and linear movement at the same time are not supported. The trajectory sampler implements rotate-then-move policy.
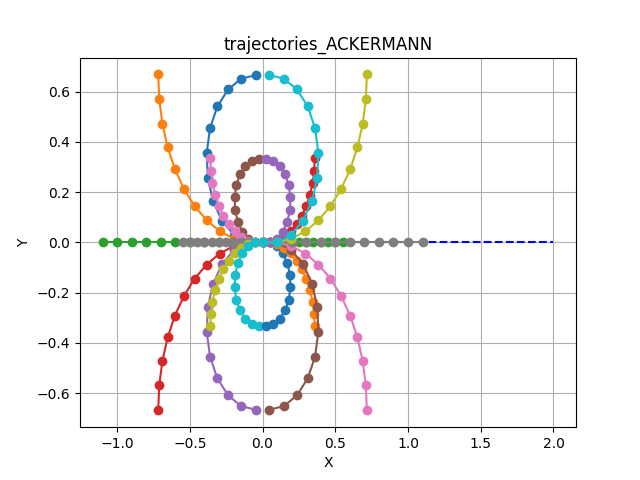
Generated Trajectory Samples for an Ackermann Robot#
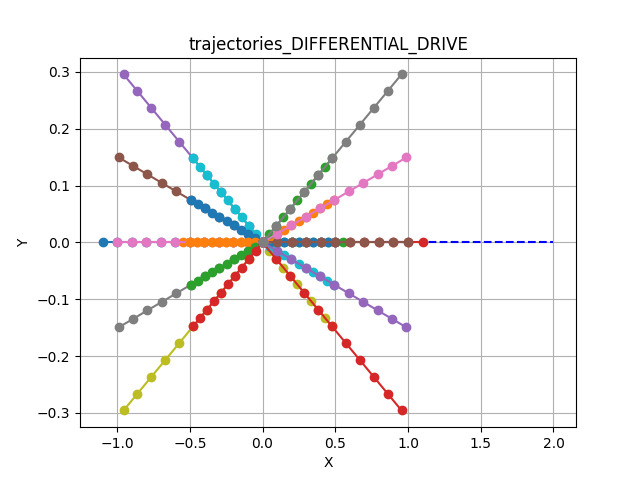
Generated Trajectory Samples for a Differential Drive Robot#
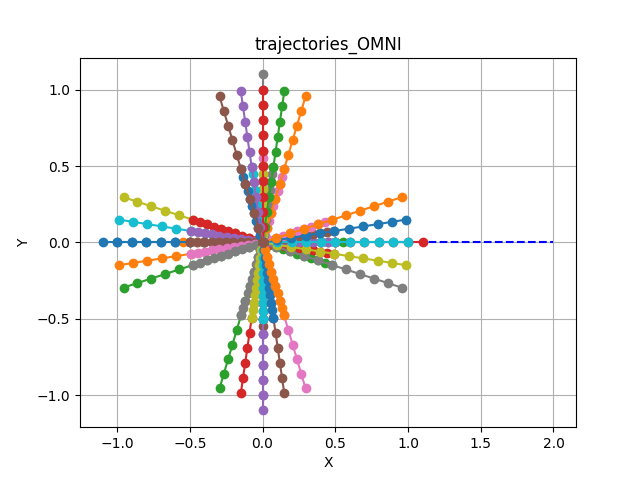
Generated Trajectory Samples for an Omni motion Robot#
Admissible trajectory criteria:#
A collision-free admissibility criteria is implemented within the trajectory samples generator using FCL to check the collision between the simulated robot state and the reference sensor input.
Trajectory Selection#
The cost of each admissible sample is computed using Cost Evaluator and the sample with the lowest cost is selected for navigation. After calculating the cost using the cost evaluation function, the total cost is computed as the sum of all the costs weighed by each cost respective weight.
Tip
Set the costs weights directly in the DWA config