
Navigation Components Overview#
Kompass is designed to make autonomous navigation easy to set up, flexible to customize, and powerful enough for robots working in changing real-world conditions. Think of it as a collection of building blocks: you choose the ones you need, configure them for your robot, and you’re good to go!
Kompass Components and Main Tasks#
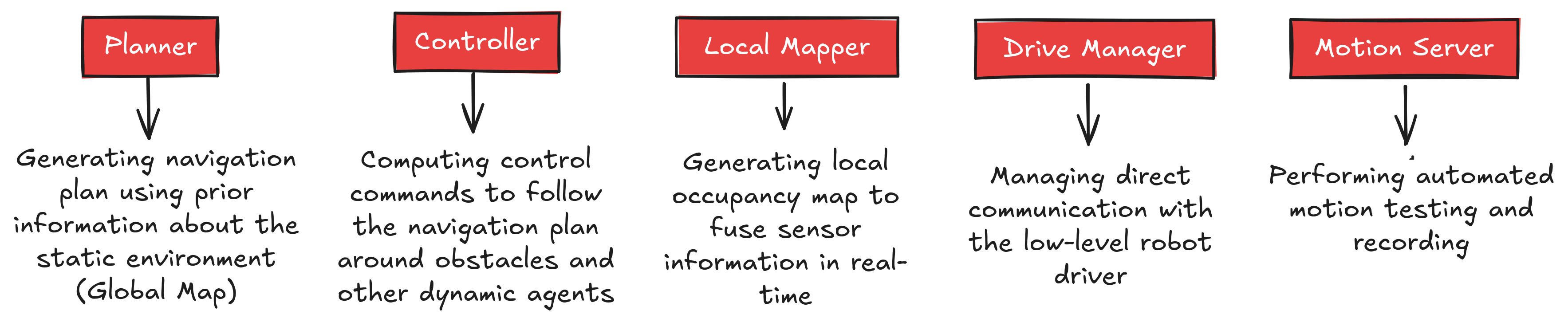
Kompass Components and Main Tasks#
Each component runs as a ROS2 lifecycle node and communicates with the other components using ROS2 topics, services or action servers:
System Diagram for Point Navigation#
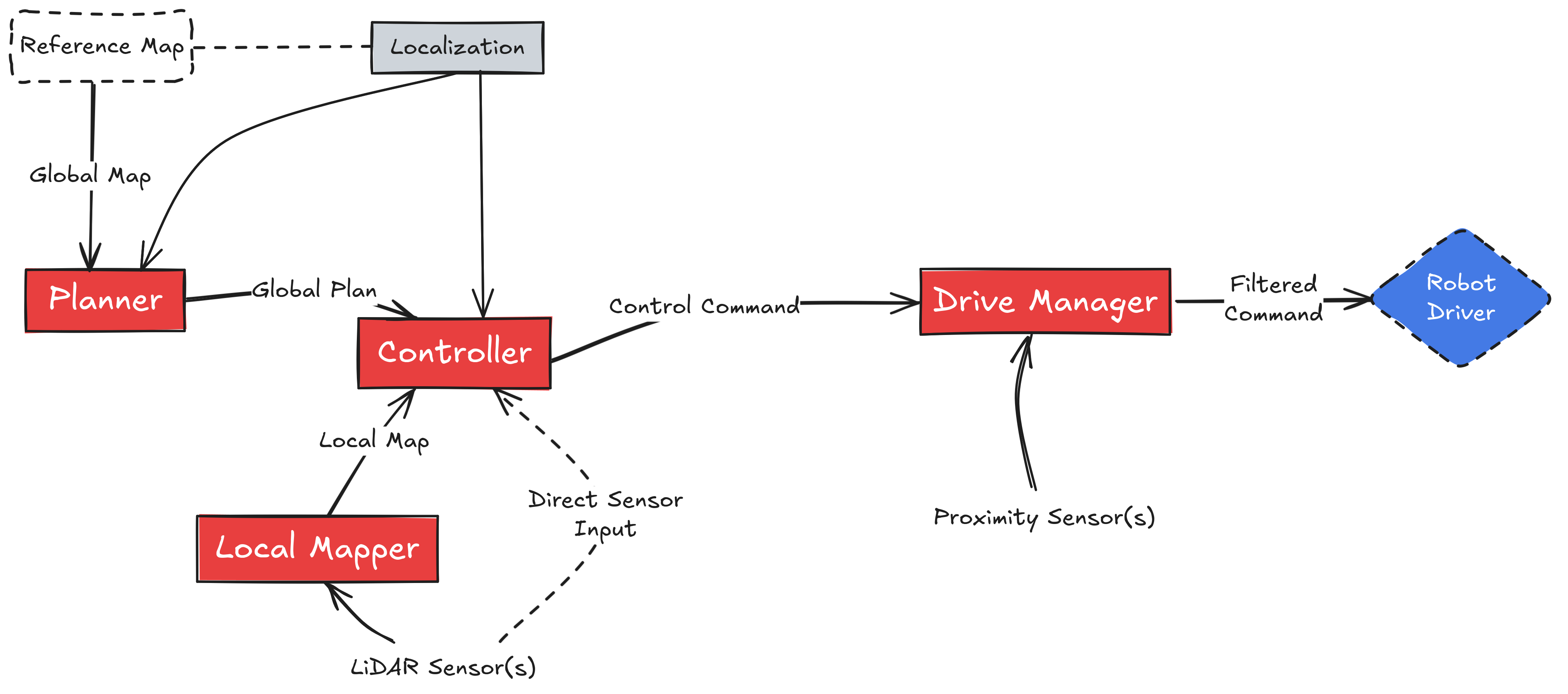
System Diagram for Point Navigation#
In the following, we give a quick tour of the core navigation components, what each one does, and what sensors you actually need to get Kompass up and running.
Core Components#
Global Planner#
The Global Planner is responsible for generating an optimal path in point navigation applications from the robot’s current position to a specified goal location. It uses a global map representation and path planning algorithms (e.g., Dijkstra, A* or sampling-based methods) to compute a collision-free route.
Key Responsibilities:
Computes long-range paths across the map.
Avoids known obstacles using global map data.
Interfaces with the
Controllerto send planned paths.
Controller#
The Controller handles local motion control for the robot. It is designed to:
Perform path following for point-to-point navigation.
Handle obstacle avoidance for unmapped obstacles and dynamic objects that appear in the environment.
Execute target following, allowing the robot to follow moving objects or people.
This makes the controller versatile, supporting both classic navigation tasks and reactive behaviors in dynamic environments.
Local Mapper#
The Local Mapper builds and maintains a real-time representation of the robot’s immediate surroundings. It integrates sensor data to create local occupancy maps or cost maps used by the Controller for reactive navigation.
Key Responsibilities:
Generates local maps for obstacle detection and avoidance.
Provides updated environment context to the Controller.
Drive Manager#
The Drive Manager acts as the interface between navigation commands and the robot’s actuators. It handles safe motion execution and integrates emergency stop and safety-check features.
Key Responsibilities:
Translates Controllers velocity commands to the robot.
Ensures motion safety through emergency stop checks.
Map Server#
The Map Server is resposible for serving a static global map from a file and making it available to the navigation stack at runtime.
Key Responsibilities:
Convert 2D and 3D maps to OccupancyGrid ROS maps.
Serve the global map during runtime.
Save custom maps to files.
Minimum Sensor Requirements#
Kompass is designed to be flexible in terms of sensor configurations. However, at least the following sensors are required for basic autonomous navigation:
Odometry Source (e.g., wheel encoders, IMU or visual odometry)
Obstacle Detection Sensor (e.g., 2D LiDAR or Depth Camera)
Robot Pose Source (e.g., localization system such as AMCL or visual SLAM)
These provide the minimal data necessary for localization, mapping, and safe path execution.
Optional Sensors for Enhanced Features#
Additional sensors can enhance navigation capabilities and unlock advanced features:
RGB Camera(s): Enables vision-based navigation, object tracking, and semantic navigation.
Depth Camera: Improves obstacle avoidance in 3D environments and enables more accurate object tracking.
3D LiDAR: Enhances perception in complex environments with full 3D obstacle detection.
GPS: Enables outdoor navigation and geofenced planning.
Ultra-Wideband (UWB) / BLE Beacons: Improves localization in GPS-denied environments.
Kompass supports dynamic configuration, allowing it to operate with minimal sensors and scale up for complex applications when additional sensing is available.