
Quick Start (Webots Simulator)#
Here we provide a quick recipe to get started with Kompass using Webots simulator. The recipe is a single python script to build a point navigation system. Lets first see how we can launch the simulation and run the recipe and then we will go through it step by step.
Install the dependencies and launch the simulation#
For an easy start with Kompass we created a separate simulation package (kompass_sim) with ready-to-launch examples created to test 2D navigation using few popular robot simulators. In this example we will use a simulation of the Turtlebot3 robot in Webots simulator.
Note
All the required simulation dependencies are found in kompass-sim and can be installed with rosdep
Start by cloning and building
kompass_simfrom source, see the instructions hereNow you can launch the simulation by simply running:
ros2 launch kompass_sim webots_turtlebot3.launch.py
This will start Webots simulator, Rviz, the robot localization node and the map server:
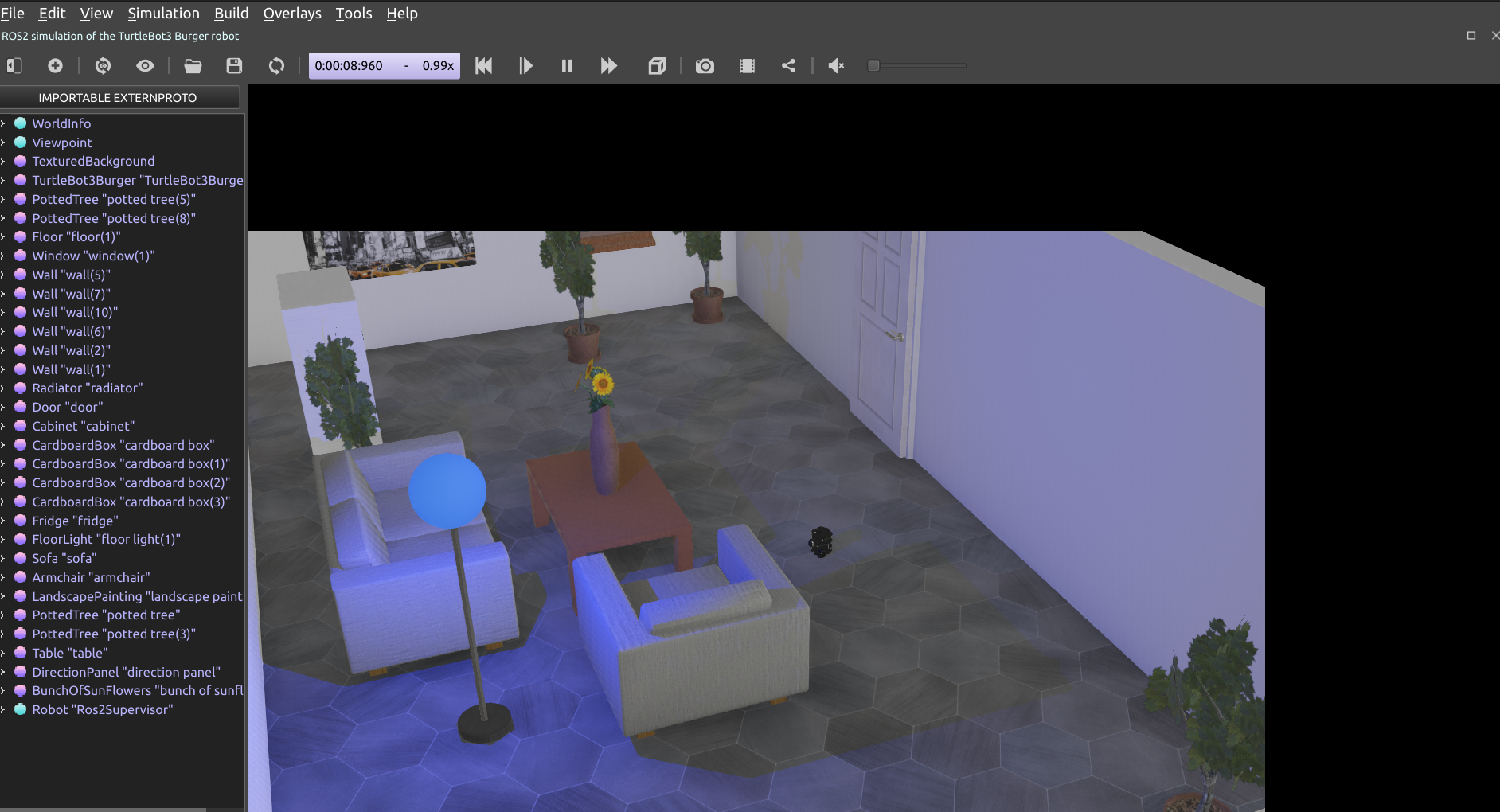
Webots Tutrlebot3 Simulation#
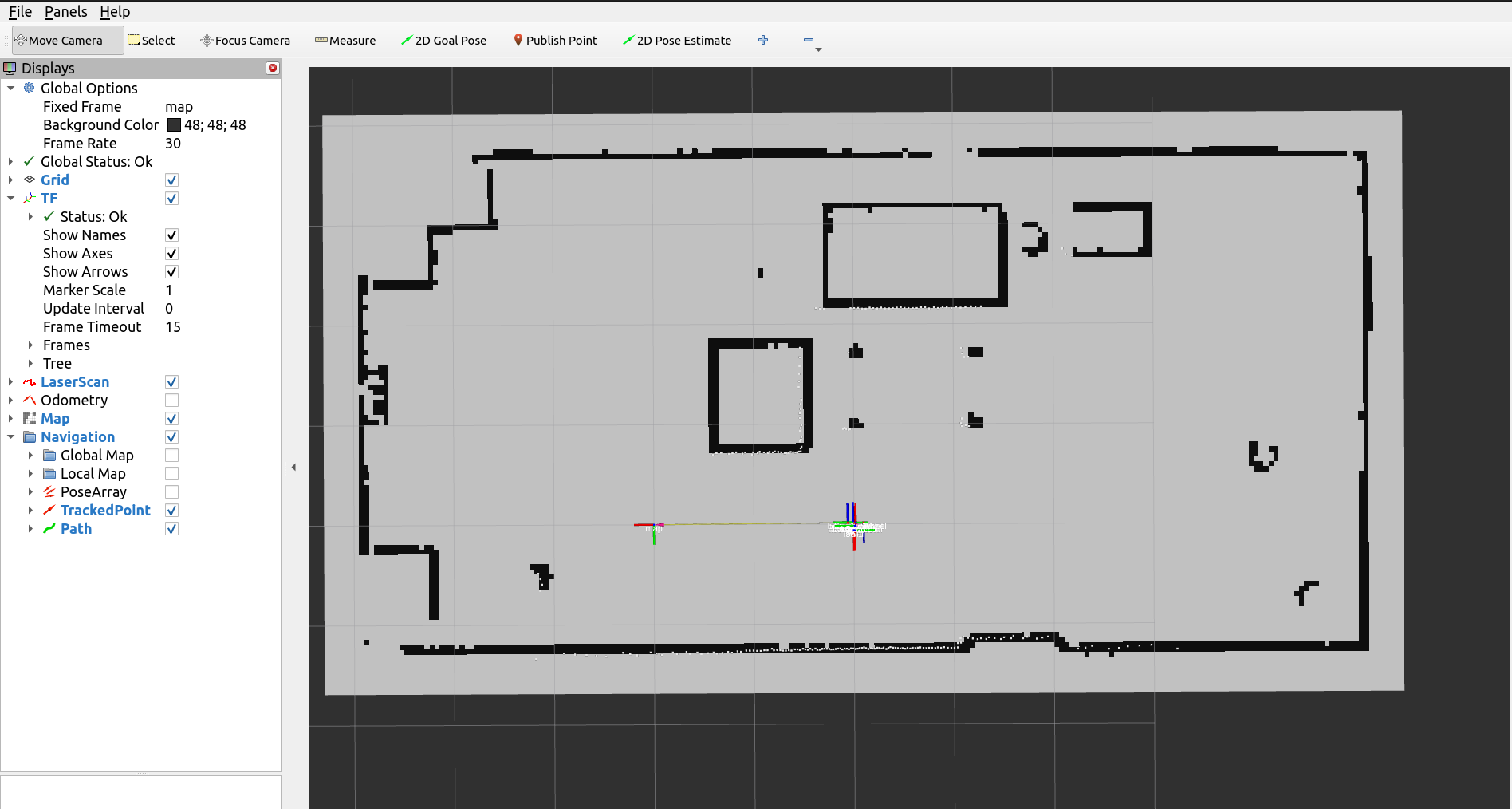
Rviz#
Note
If Webots simulator is not already installed, an installation prompt will appear on the first run of the previous script
Run the recipe#
Open a new terminal and launch our recipe:
ros2 run kompass turtlebot3_test
Test sending Goals#
You can now send navigation goals to Kompass by using the clicked_point directly on Rviz.
Now, lets keep going and break the turtlebot3_test recipe step by step 👇